
Diagnóstico funcional de la VCS. Errores y sus soluciones
Traducción automática
El artículo original está escrito en idioma RU (enlace para leerlo) .
Siempre hemos tenido un interés especial en trabajar con los parámetros individuales de articulación de la mandíbula inferior. Si lo piensas, ¿qué muestran las trayectorias de movimiento de la m/i? Son el resultado del trabajo no solo de las articulaciones temporomandibulares (cabezas de la m/i y meniscos), sino también del sistema muscular, ligamentos y filas de dientes.
Sobre el diagnóstico de trastornos internos de la ATM mediante RM en el webinar Algoritmos diagnósticos de RM de la ATM.
Al realizar tratamiento ortodóncico, ortopédico y terapéutico, el médico modifica y crea nuevos parámetros para la articulación de la m/i o intenta conservar los anteriores. El tiempo mostrará cuán funcionales serán las nuevas condiciones para el funcionamiento del complejo anatómico descrito anteriormente. En este artículo nos gustaría hablar sobre las principales etapas que son una parte integral de la diagnóstico funcional inicial de la ATM, y sobre el equipo necesario para el diagnóstico.
Condicionalmente, el trabajo de un médico con el uso de equipo adicional se puede dividir en trabajo en espacios reales y virtuales. El único criterio para un resultado exitoso en estos dos formatos es el uso correcto del equipo, la comprensión de sus capacidades técnicas y la precisión de su programación.

Etapa I: transferencia de la posición de los dientes al articulador utilizando arcos faciales medioanatómicos, problemas potenciales y sus soluciones
Los arcos faciales medioanatómicos y anatómicos se utilizan para transferir el modelo de yeso de los dientes al articulador. La correcta colocación del arco facial en la cabeza del paciente afecta el diagnóstico posterior y el resultado del tratamiento. Hay dos tipos de arcos faciales medioanatómicos: aquellos que se orientan en la cabeza del paciente basándose en puntos de referencia cutáneos en relación con el plano de Camper o el plano de Frankfurt (figura 1).
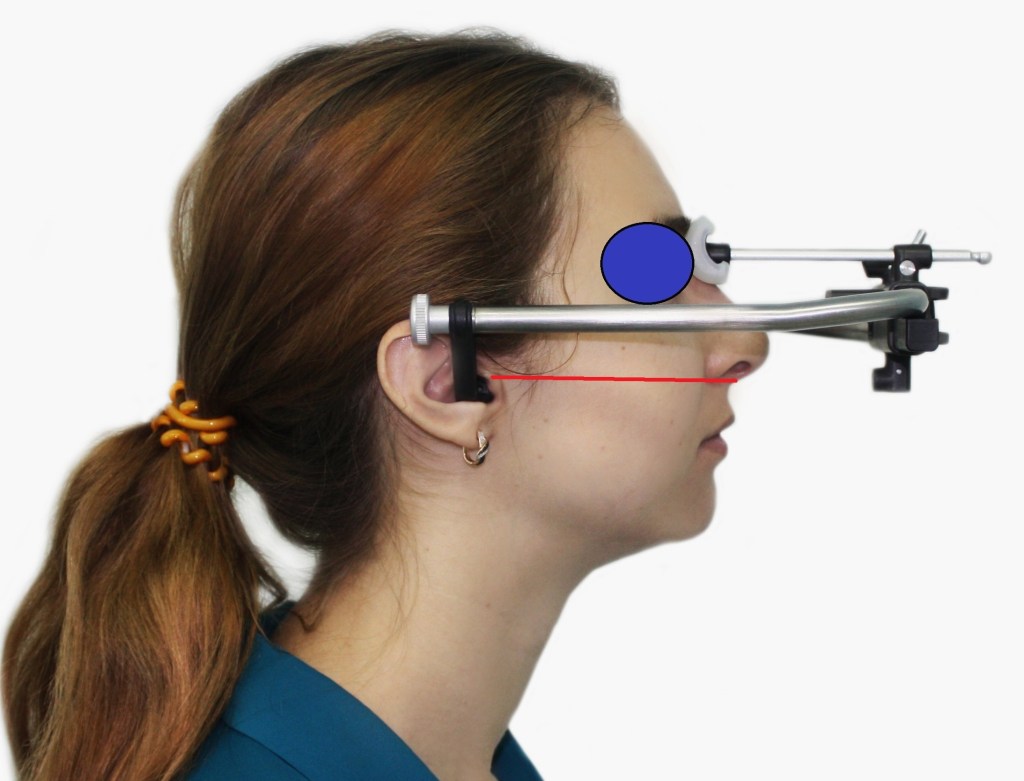
Figura 1. Ubicación del arco facial Arcus (Kavo).
No en todos los casos clínicos los puntos de referencia cutáneos coinciden con los óseos, lo que posteriormente puede llevar a errores al vaciar el modelo en yeso. El principio de trabajo con tal arco es el cumplimiento obligatorio de la paralelidad entre el arco facial situado en la cabeza del paciente y el plano de Camper, formado por puntos de referencia cutáneos.
¿Qué hacer si los puntos de referencia cutáneos no coinciden con los óseos?
Realizar un estudio radiológico de la cabeza con puntos de contraste cutáneos sobre el plano mencionado para un análisis más detallado. Clínicamente, esta técnica se vuelve complicada, ya que no en todas las clínicas se puede realizar tal estudio radiológico. Si se ignora este parámetro, puede llevar a un cambio en la inclinación del modelo en el plano sagital (figura 2).

Figura 2. Rotación del modelo en/por la proyección sagital en sentido horario o antihorario.
¿Qué hacer si el plano de Camper no es paralelo al protésico?
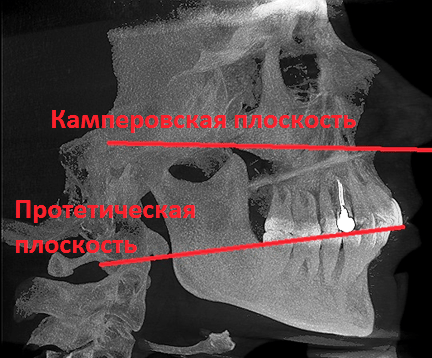
Figura 3. TC de la cabeza. Análisis de la orientación de los planos.
¿Y por qué los planos deben ser paralelos (figura 3)? Si en el articulador el modelo se coloca elevado en la zona de los incisivos en la proyección sagital, pero al mismo tiempo el arco facial está orientado correctamente respecto a los puntos de referencia óseos del plano de Camper, esto no se considerará un error.
Los errores que pueden surgir al usar arcos faciales medioanatómicos pueden ocurrir en la proyección sagital (inclinación del modelo hacia adelante o hacia atrás), en el plano frontal (inclinación del modelo hacia la derecha o hacia la izquierda), y en el plano horizontal (rotación del modelo, figura 4).
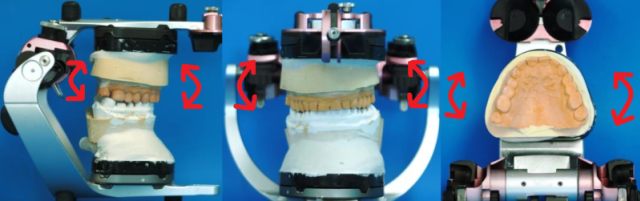
Figura 4. Posibles movimientos del modelo en el articulador.
Uno de los errores más graves es la incapacidad para controlar la distancia desde el modelo hasta las cabezas articulares (figura 5).

Figura 5. Montaje del modelo en el articulador utilizando un arco facial. Falta de control en la relación entre el modelo y los mecanismos articulares del articulador.
Este error está relacionado con el hecho de que en el tenedor de mordida con registrador no hay un punto de referencia para los incisivos superiores, por lo tanto, la distancia desde el modelo hasta las articulaciones no está fijada. Se sabe que para el funcionamiento normal de los modelos de yeso en el articulador, considerando los parámetros promedio, se deben tener en cuenta los datos del triángulo de Bonwill (distancia desde los incisivos inferiores hasta los mecanismos articulares del articulador). Pero, dado que el uso del arco facial implica la transferencia del modelo superior, es necesario, en primer lugar, mantener la distancia individual desde los incisivos superiores hasta los mecanismos articulares.
Así, al usar arcos faciales medio anatómicos, existen errores que pueden o no ser corregidos. Esto está relacionado con las deficiencias en la estructura de los mismos arcos.
Solución de problemas que surgen al usar arcos faciales medio anatómicos
Para resolver los problemas que surgen al usar arcos faciales medio anatómicos, hemos desarrollado una técnica para transferir el modelo superior al articulador y equipo adicional - un marcador central y un soporte (figura 6).
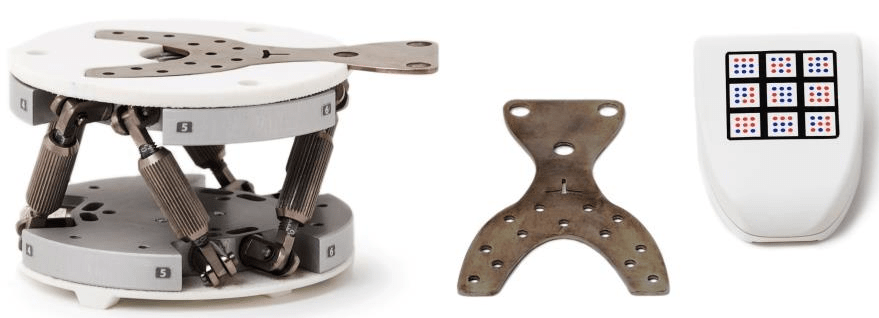
Figura 6. Soporte para yeso y marcador central (Prosystom).
El marcador central consta de un tenedor y un controlador. Para controlar la posición del modelo en/sobre el marcador, hay una marca para los cortadores. Al usar el marcador central, hemos eliminado cualquier punto de referencia cutáneo para minimizar errores (figura 7).

Figura 7. Ubicación del marcador central al registrar la posición de la plancha protésica.
Después de determinar la posición individual de la plancha protésica, el controlador emite datos para ajustar el soporte según los parámetros individuales (figura 8).
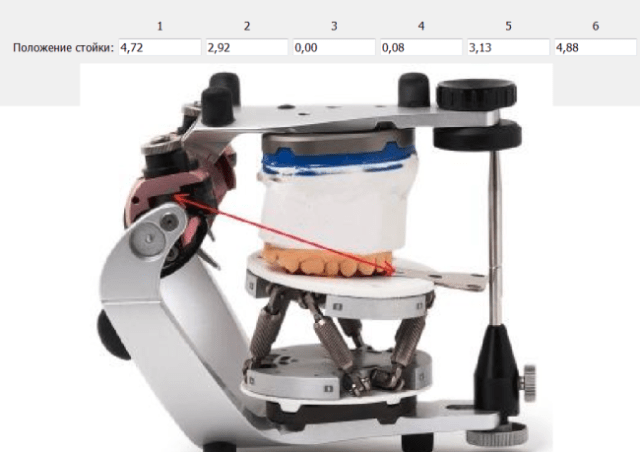
Figura 8. Encalado del modelo en/por usando el soporte en el articulador Protar.
Para tener en cuenta todos los parámetros individuales en el encalado, utilizamos un módulo adicional de CT (figura 9).
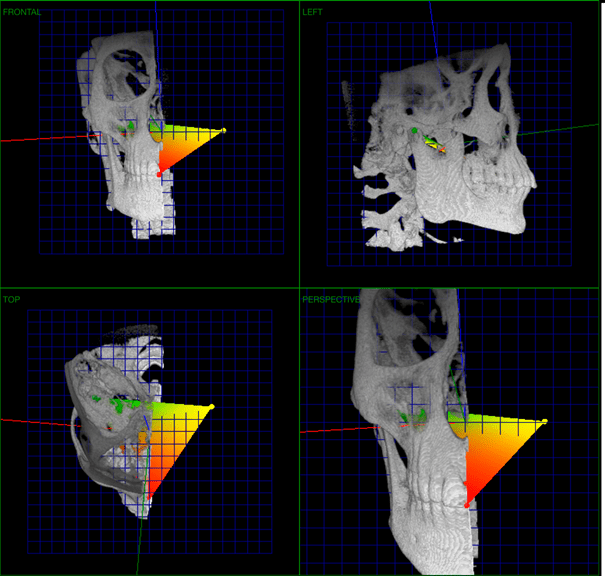
Figura 9. Módulo CT para yeso (Prosystom).
Este módulo permite medir la distancia individual desde los incisivos de la mandíbula superior hasta las cabezas articulares para su posterior transferencia al articulador. En esta técnica se utilizan 3 puntos de referencia: el punto interincisivo en el área del borde cortante de los dientes centrales superiores y puntos en el área de las cabezas articulares. Nota: es irrazonable establecer el punto de referencia del eje de la articulación usando solo CT, esto se debe a diferencias significativas en la estructura de las cabezas articulares de la mandíbula inferior de una persona y el articulador (figura 10).
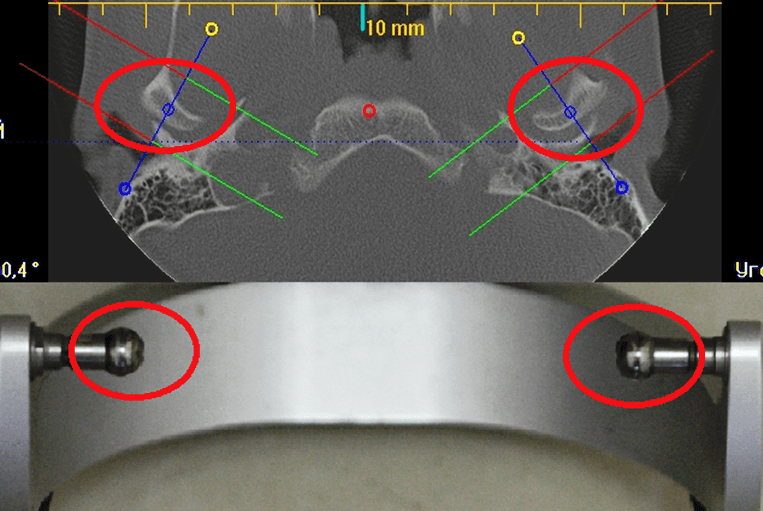
Figura 10. Análisis comparativo de la estructura anatómica de las cabezas de la mandíbula inferior y las cabezas articulares del marco inferior del articulador.
Por lo tanto, marcamos el punto en la zona de las articulaciones en la cima de las mismas. Definir un punto en los mecanismos articulares del articulador tampoco presenta dificultades. Después de que los modelos están correctamente yesados en el articulador teniendo en cuenta los parámetros individuales, se puede proceder a su ajuste.
II etapa: Programación del articulador según parámetros individuales, uso de sistemas electrónicos de registro de articulación n/ч, errores que ocurren al usar axiógrafos electrónicos
La segunda parte del artículo está dedicada a la programación de articuladores: revelaremos algunos problemas no resueltos en el uso de axiógrafos electrónicos, ya que estos sistemas son los más precisos. Sigue siendo una cuestión abierta respecto al alto costo de los axiógrafos electrónicos. Este equipo es secundario en el trabajo y solo se necesita para registrar las trayectorias de movimiento n/ч y sus valores digitales. Los sistemas electrónicos de registro han estado en el mercado durante mucho tiempo, pero hasta ahora no son especialmente demandados. ¿Por qué? El alto precio, la falta de información accesible para los médicos, los errores en su uso en casos clínicos complejos, algunos dispositivos tienen una estructura bastante compleja.
Los sistemas electrónicos de registro, cuando se utilizan correctamente, son el único equipo que permite:
- registrar cualquier trayectoria de movimiento n/ch;
- obtener datos individuales para la programación de articuladores;
- obtener una representación tridimensional de la articulación n/ch;
- trabajar en un espacio virtual con parámetros individuales;
- obtener datos para el análisis de la oclusión dinámica utilizando modelos virtuales;
- el uso de estos dispositivos permite la observación dinámica de pacientes durante tratamientos prolongados.
Los articuladores mecánicos, electrónicos y virtuales son el equipo principal en esta lista, ya que se utilizan para fabricar construcciones. Los axiógrafos son equipos auxiliares necesarios para ajustar los articuladores.
Los sistemas electrónicos más comunes son los ultrasónicos. Estos sistemas tienen debilidades.
Estructura de la horquilla paraoclusal para la fijación del sensor ultrasónico (figura 11).
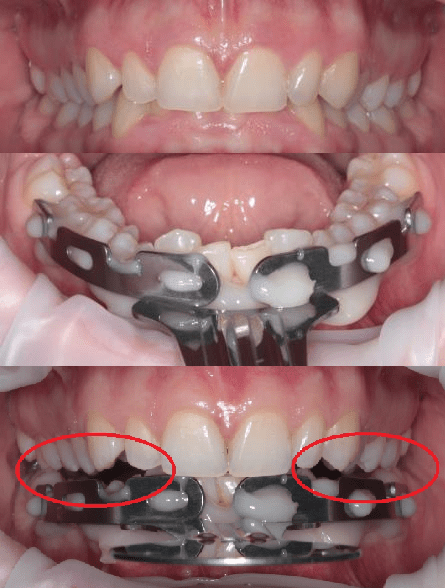
Figura 11. Ubicación de la horquilla paraoclusiva en la fila dental n/c.
Un profundo solapamiento incisivo sirve como una contraindicación relativa para realizar un registro preciso de la articulación n/c. Además, con una baja altura clínica de la parte coronal de los dientes n/c, y en la presencia de desgaste patológico del grupo frontal de dientes n/c, la horquilla puede impedir el cierre habitual de las filas dentales. Consideramos esto como una seria desventaja, especialmente en el diagnóstico de pacientes con disfunciones de ATM, ya que esto lleva a la separación de las filas dentales: el contacto permanece, principalmente, entre los incisivos s/c y la horquilla paraoclusiva, lo que a su vez puede llevar a un desplazamiento no controlado de n/c.
En tal caso, es posible registrar las trayectorias de movimiento de n/c, pero será prácticamente imposible determinar dónde estaban las articulaciones al inicio de las trayectorias (figura 12). El análisis articulatorio para obtener datos digitales al programar el articulador según parámetros individuales será inútil, ya que las trayectorias clásicas que involucran las filas dentales estarán alteradas.
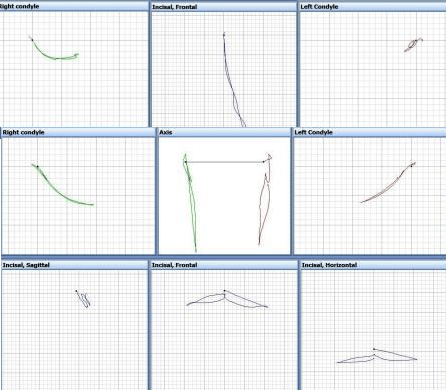
Figura 12. Trayectorias de movimientos n/c: apertura-cierre y laterotrusion.
Obtención de diferentes trayectorias en un mismo paciente en varios estudios con un intervalo de tiempo.
Primero, el axiógrafo se fija en la cabeza del paciente, se registra la trayectoria (por ejemplo, apertura-cierre de la boca), y luego las trayectorias se muestran en la pantalla (figura 13).
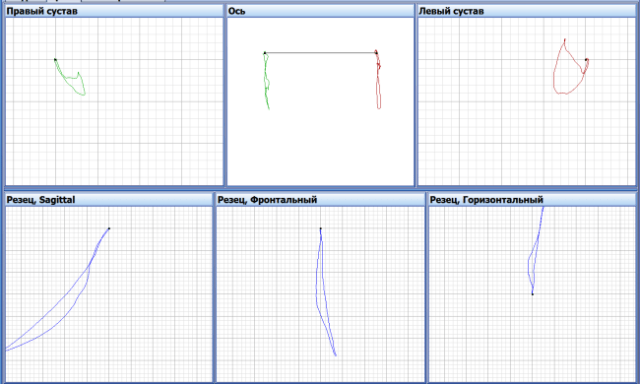
Figura 13. Trayectorias de apertura-cierre de la boca.
Posteriormente, el axiógrafo se retira completamente de la cabeza del paciente y el mismo estudio se realiza después de 15 minutos. Pero en el siguiente estudio se obtuvieron diferentes trayectorias (figura 14).
¿Cuáles datos de estos estudios son correctos?
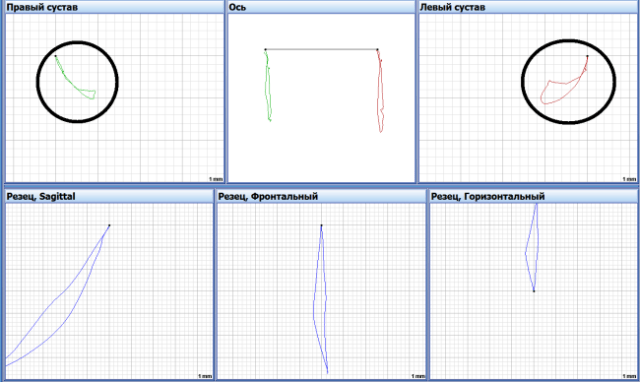
Figura 14. Trayectorias registradas después de 15 min. Apertura y cierre de la boca.
También se registraron movimientos de la mandíbula inferior teniendo en cuenta las guías dentales para obtener valores digitales de los ángulos y se obtuvieron datos diferentes (figura 15).
¿Según qué datos se debe programar el articulador?
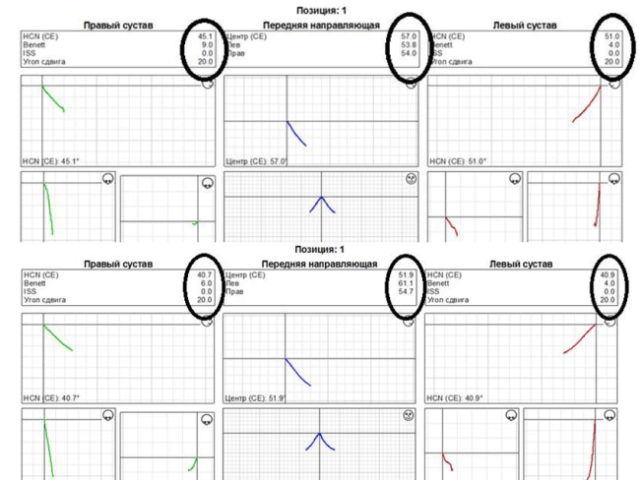
Figura 15. Diferentes datos para la programación del articulador.
Los errores de datos surgen, en primer lugar, debido a las diferencias en la fijación del axiógrafo ultrasónico en la cabeza del paciente durante las mediciones mencionadas anteriormente. Para resolver parcialmente estos problemas, es necesario mantener el registro obtenido con el tenedor del arco dental en/sin cambios, y no alterar la posición del tenedor paraoclusal durante los estudios con intervalos de tiempo.
Solución a los problemas que surgen en la axiografía electrónica
El principal resultado de nuestras investigaciones fue la creación de un aparato más preciso y accesible para registrar los movimientos en/sin y la corrección de la propia metodología de la axiografía electrónica (fig. 16). Desarrollamos el aparato Dentograf (Prosystom).
Figura 16. Aparato óptico para el registro de la articulación n/ч Dentograf (Prosystom).
Hoy en día, Dentogaf es el aparato más compacto y fácil de manejar para el registro de trayectorias. Es un aparato óptico que utiliza solo una cámara en su funcionamiento.
Considerando los problemas descritos anteriormente, que surgen con la fijación del sensor en n/ч, hemos diseñado marcadores especiales que permiten realizar estudios prácticamente con cualquier patología de las filas dentales. Ahora, el profundo solapamiento incisivo no es un obstáculo para los estudios (figura 17).
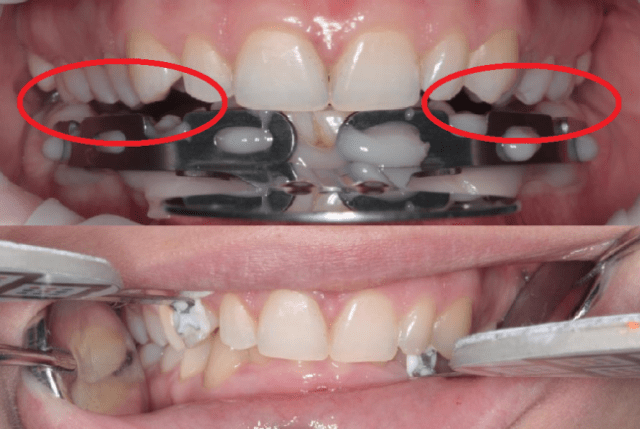
Figura 17. Ubicación de la horquilla paraoclusal y marcadores laterales del aparato Dentograf.
Un sensor central, que sirve para determinar la posición individual del plano protésico, y dos laterales (figura 18). Un marcador lateral se fija al diente superior, y el otro al diente inferior. En esta técnica, hemos abandonado completamente el uso de arcos faciales medioanatómicos, aumentando así significativamente la precisión del diagnóstico.

Figura 18. Kit de sensores del aparato Dentograf.
Ha surgido la posibilidad de realizar estudios sin ningún problema en pacientes que están recibiendo tratamiento ortodóntico con sistemas de brackets (figura 19).

Figura 19. Ubicación de los sensores laterales en pacientes con sistema de brackets en los dientes.
Todas las técnicas y equipos descritos anteriormente de la empresa Prosystom permiten realizar diagnósticos de precisión y planificar tratamientos en el espacio real.
III etapa: Uso del articulador virtual en el diagnóstico funcional primario (trabajo con modelos virtuales)
La siguiente tarea importante que intentamos resolver es la aplicación de nuestras capacidades en el espacio virtual, específicamente el trabajo con modelos virtuales.
¿Qué hay de nuevo con la aparición de los articuladores virtuales?
El articulador mecánico permite reproducir 3 trayectorias: protrusión, laterotrusion a la derecha y a la izquierda.
El articulador virtual permite reproducir 3 trayectorias: protrusión, laterotrusion a la derecha y a la izquierda.
Los articuladores virtuales son una réplica completa de los mecánicos, solo ha cambiado el espacio – de real a virtual.
¿Qué tan necesarios son los articuladores virtuales disponibles, si sus capacidades funcionales están limitadas?
Por ejemplo, ¿por qué no es posible reproducir cualquier trayectoria en el espacio virtual y qué lo impide?
Lo impiden los articuladores virtuales existentes en el software actual, más precisamente su estructura (figura 20).
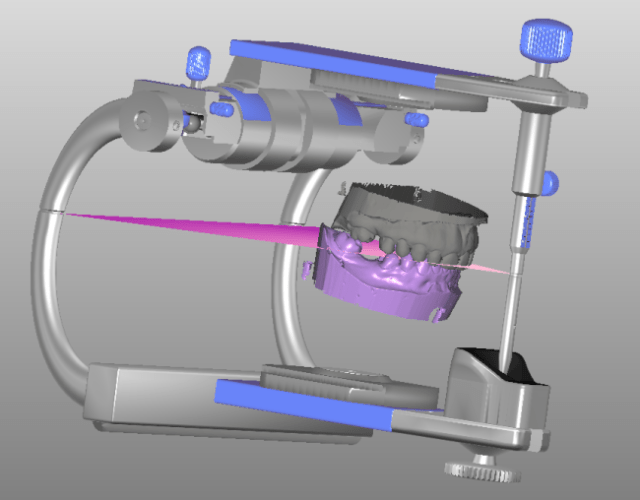
Figura 20. Articulador virtual.
Solución a los problemas que surgen al usar articuladores virtuales.
Para trabajar en el espacio virtual, teniendo en cuenta los parámetros individuales del paciente, son necesarios: tomografía computarizada, modelos virtuales, trayectorias de movimiento y la correcta orientación del modelo virtual en/sobre y bajo/detrás.
Si se intenta eliminar el articulador al trabajar en el espacio virtual, entonces surgen nuevas oportunidades prometedoras:
- Relación individual de modelos virtuales y articulaciones n/ч. Para esto, es necesario utilizar la TC de la cabeza del paciente y modelos virtuales. Conectar la TC y los modelos no presenta grandes dificultades hoy en día (figura 21).
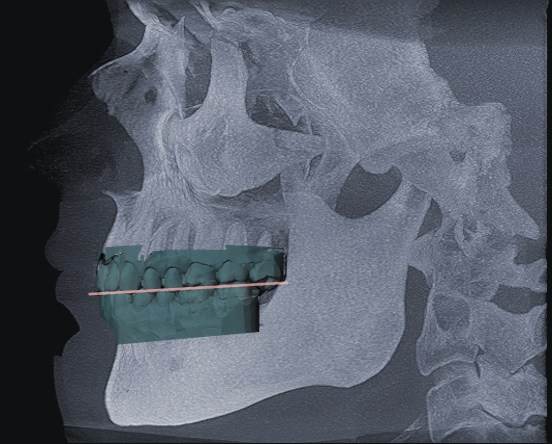
Figura 21. Integración de TC y modelos virtuales.
- Reproducción de cualquier trayectoria de articulación n/ч utilizando modelos virtuales (figura 22). Para esto, utilizamos el aparato Dentograf.
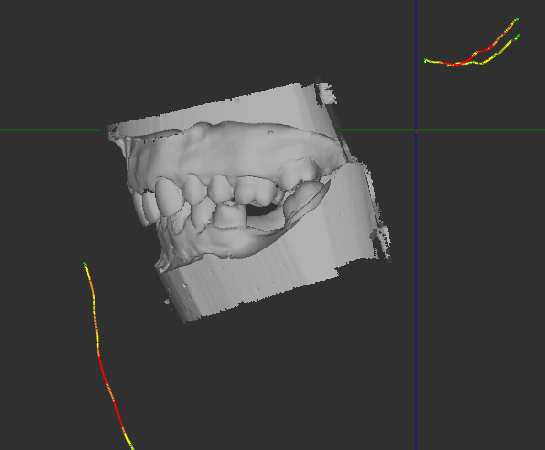
Figura 22. Trayectorias de movimiento de n/c y modelos virtuales.
- Orientación de los modelos en el espacio virtual. El uso de un marcador central permite ubicar el modelo de n/c en el espacio virtual de la misma manera que en el paciente (figura 23).

Figura 23. Uso del marcador central para posicionar los modelos en el espacio virtual.
Realización de diagnóstico funcional de VNC (Conclusión)
Hemos desarrollado un método integral y nuevo equipo para realizar el diagnóstico funcional primario de VNC. Este equipo es universal para trabajar en espacios reales y virtuales con mínimas imprecisiones.
Más detalles sobre el diagnóstico de lesiones de VNC en el webinar Estudio radiológico de VNC. Nivel avanzado.
http://stomanet.ru/